AngGo Pro, ICROS2023
박하은, 윤승호, 이지연, 김병헌, 박수영, 이희승.(2023).ToF 거리 센서로 주행 모드 전환 인터랙션이 가능한 실내용 스마트 모빌리티 앙고(AngGo) 개발.제어로봇시스템학회 논문지,29(5),426-434.
Abstract
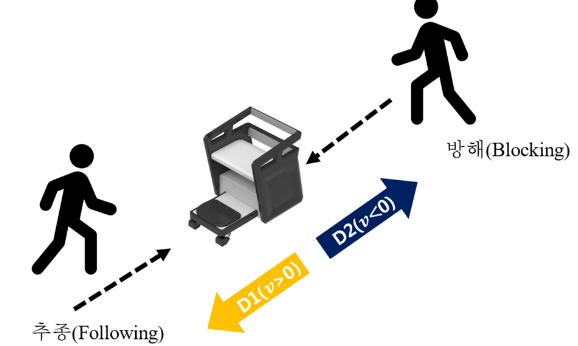
전기 스쿠터와 자전거와 같은 많은 공유 이동 서비스가 야외에서 사용할 수 있습니다. 그러나 실내 환경에 적합한 공유 이동 수단을 찾는 것은 여전히 중요한 과제입니다. 본 논문에서는 실내 공간에서 편리하게 이동하고 상호작용을 통해 사용자의 의사를 전달할 수 있는 공유 실내 스마트 모빌리티 차량인 AngGo를 제안합니다. 앙고는 의자 모양의 모빌리티 차량으로 반자율 주행 모드, 발판 수동 주행 모드, 조이스틱 수동 주행 모드, 대기 모드 등 4가지 모드를 갖추고 있습니다. 반자율 모드에서 AngGo는 6개의 비행 시간(ToF) 거리 센서를 사용하여 잠재적인 사용자를 검색하고 실내 공간을 탐색할 수 있습니다. 사용자가 움직이는 AngGo에 탑승하는 것이 어렵다는 것을 알게 된 우리는 ToF 거리 센서를 이용한 양방향 모드 전환 상호 작용, 즉 추종 및 차단을 개발했습니다. 이를 통해 앙고는 사용자의 특정 이동을 통해 대기 모드로 전환할 수 있습니다. 대기 모드에서는 사용자가 AngGo에 탑승하면 발판 수동 주행 모드로 전환됩니다. 이후 조이스틱 버튼을 눌러 AngGo의 모드를 조이스틱 수동 모드로 변경할 수 있습니다. 또한 전환 모드 상호 작용 측면에서 두 방법의 작업 부하를 평가하기 위해 사용자 실험을 수행했습니다. 결과적으로 워크로드에 큰 차이가 없었습니다. 그러나 인터뷰를 바탕으로 사용자들은 차단 방법보다 다음과 같은 방법을 선호했습니다.